Laserscanning-Software: Über den Punktwolken schweben
Wie schnell und effizient Bestandsobjekte erfasst werden, darüber entscheiden nicht nur 3D-Laserscanner, sondern auch die auswertende Software. Was können aktuelle Punktwolken-Programme, wo stecken noch Entwicklungspotenziale und was sind die Trends?

Wie schnell und effizient Bestandsobjekte erfasst werden, darüber entscheiden nicht nur 3D-Laserscanner, sondern auch die auswertende Software. Was können aktuelle Punktwolken-Programme, wo stecken noch Entwicklungspotenziale und was sind die Trends?
Das 3D-Laserscanning hat gegenüber anderen Messverfahren viele Vorteile, beispielsweise dass wichtige Maße vor Ort nicht vergessen werden können. © Allplan
3D-Laserscanner haben das geometrische Aufmaß von Objekten revolutioniert. Geht es insbesondere um die präzise dreidimensionale Erfassung von stark strukturierten Objekten wie gebäudetechnischen Anlagen, Stahl- und Holzkonstruktionen oder das verformungsgerechte Aufmaß, ist diese Messtechnik unschlagbar. Im Gegensatz zu anderen Verfahren, wie der Tachymetrie, werden nicht einzelne, markante Objektpunkte gemessen, sondern das gesamte Messobjekt rasterförmig abgetastet und dessen Geometrie digital durch eine aus mehreren Millionen 3D-Messpunkten bestehende „Punktwolke“ beschrieben (architektur 2/2018: Gebäudebestand BIM-konform erfassen). Seit Einführung Ende der 1990er-Jahre hat die Hardware-Technik hinsichtlich der Messgenauigkeit, Geschwindigkeit und Zuverlässigkeit einen hohen Standard erreicht. So hat sich insbesondere die Messfrequenz vervielfacht – und damit auch die Anzahl der Messpunkte. Die Vielzahl der Messpunkte hat Vor-, aber auch Nachteile: So dauert es zwar nur wenige Minuten, bis mehrere Millionen von Messpunkten vor Ort erfasst sind, jedoch viele Stunden, bis die Daten im Büro bearbeitet, ausgewertet und daraus für Architekten, Ingenieure, Denkmalschützer, Stadtplaner oder Facility Manager verwertbare 3D-Modelle und 2D-Pläne entstehen. Ausgeklügelte Filtertechniken, Modellierwerkzeuge, Automatismen und der Einsatz künstlicher Intelligenz versprechen Abhilfe.

Eine schnelle Auswertung der Scandaten im Büro hat einen entscheidenden Einfluss auf die Wirtschaftlichkeit des 3D-Laserscannings. © Aurivus
Vom Messobjekt zur Punktwolke
Bevor von einem realen Objekt ein digitales Abbild als Punktwolke und daraus ein 3D CAD- oder BIM-Modell entsteht, sind viele Arbeitsschritte erforderlich, die sich kaum automatisieren lassen. Zunächst muss der Scanvorgang vorbereitet werden: Standpunkte müssen so gewählt werden, dass mit möglichst wenigen Messungen möglichst viele Objektdetails erfasst werden und dabei möglichst wenige Mess-Schatten entstehen. Ferner müssen Grundeinstellungen vorgenommen werden, beispielsweise die Auflösung. Im Objektraum verteilte Zielmarken, Referenzkugeln oder markante, von mehreren Standpunkten erkennbare Objektpunkte, ermöglichen eine relative Orientierung der von den einzelnen Standpunkten erstellten Scanaufnahmen und eine passgenaue Zusammenführung zu einer Gesamt-Punktwolke, auch Registrierung genannt. Der eigentliche Messvorgang wird mit Hilfe einer scannerspezifischen Software gesteuert und kann – abhängig vom Scannertyp, der Messpunktdichte sowie vom Messobjekt – zwischen wenigen Sekunden und einigen Minuten dauern. Da nur das, was der Scanner erfasst hat, ausgewertet werden kann, werden die Messdaten noch vor Ort auf Korrektheit und vor allem Vollständigkeit geprüft. Ist alles vollständig, werden die Messdaten in den Standard- oder Herstellerformaten XYZ, E57, FLS, PTG, PTX, RXP, ZFS etc. in die Auswertungssoftware importiert und im Büro ausgewertet. Dabei werden die einzelnen Standpunkte im Büro in ein übergeordnetes Koordinatensystem eingebunden. Da die Anzahl der Messpunkte und die Größe der Punktwolken eine Datenreduzierung erforderlich machten, bieten Auswertungsprogramme diverse Funktionen und Filter an, die beispielsweise Messpunkte mit einer definierten Entfernung automatisch ausblenden. Zusätzlich können bestimmte Punktwolkenbereiche über manuelle Bereichsdefinitionen ein- oder ausgeblendet werden, was beispielsweise die Auswertung von Details vereinfacht.

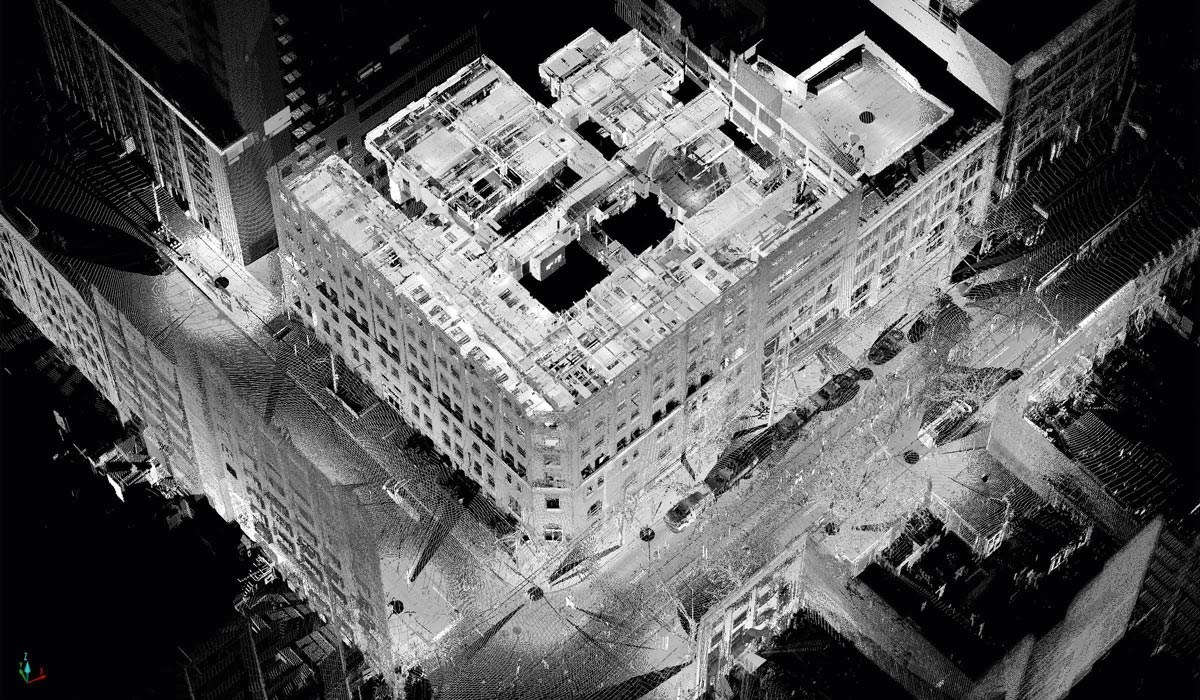
Die Objekterfassung dauert nur wenige Minuten, jedoch viele Stunden, bis aus den Punktdaten für Planer verwertbare Pläne oder Modelle entstehen. © Leica Geosystems, Hexagon
Von der Punktwolke zum 3D-Modell
Im Gegensatz zu Flächen werden Objektkanten und -ecken nur selten vom Laserstrahl des 3D-Scanners erfasst. Aus den extrem großen Dateien mit bis zu 10 Millionen Punktwerten und mehr müssen deshalb wesentliche von unwesentlichen oder überzähligen Informationen getrennt und in eine für CAD- und Visualisierungs-Programme verwertbare, aus Linien, Flächen, Quadern, Zylindern und anderen geometrischen Grundkörpern oder aus BIM-Objekten bestehende Vektordaten überführt werden. Diese in der Regel manuelle 3D-Modellierung erfordert am meisten Zeit und wird entweder mit gerätespezifischer oder allgemeiner Software durchgeführt (siehe auch Info-Kasten). Es gibt auch entsprechende Plugins, wie zum Beispiel Leica CloudWorx oder PointCab Origins. Damit können CAD-Anwender Punktwolken direkt in ihrem bevorzugten CAD-System (z.B. Archicad, AutoCAD, BricsCAD oder Revit) komfortabel bearbeiten und dabei sowohl auf vertraute CAD-Funktionen zugreifen als auch auf die speziellen Punktwolken-Funktionen des Plugin. Dazu gehören beispielsweise Orthogonalansichten, mit denen man Front-, Seiten-, und Draufsichten der Punktwolke erstellen kann, ferner senkrechte oder waagrechte Schnitte (Grundrisse), Flächen- oder Ebenheitsmessungen. Der Aufwand und damit die Dauer der Punktwolken-Auswertung hängt davon ab, ob „nur“ zweidimensionale Grundrisse, Ansichten oder Schnitte gefordert sind, „einfache“ Volumenmodelle erzeugt werden sollen oder BIM-Modelle, die auch Bauteilattribute enthalten. Bei der manuellen Auswertung werden einem bestimmten Bauteil (z.B. Wand, Stütze, Decke, Tür, Fenster etc.) zuordenbare Punktwolken durch das entsprechende CAD-Bauteil überlagert. 3D-Messpunkte und daraus generierte Ebenen, Kanten, Ecken oder Achsen werden dabei als Konstruktionshilfe genutzt. Ist die Modellierung komplett, können noch Feinabstimmungen der Bauteil-Ausrichtung, der Abmessungen etc. vorgenommen werden. Anschließend können die CAD-Daten über Standardschnittstellen wie DXF, DWG oder IFC exportiert werden.

Um Punktwolkendaten rationell bearbeiten, auswerten und daraus für Planer verwertbare 3D-Modelle und 2D-Pläne zu generieren, braucht man gute Software und viel Erfahrung. © Graphisoft Center Trier
Automatisiert auswerten
Um die überwiegend manuelle Auswertung zu beschleunigen, verfügt Punktwolken-Software über verschiedene Hilfsfunktionen und Automatismen, mit denen Objektflächen sowie deren -kanten und -ecken erkannt werden. Auch standardisierte Objekte wie Stahlprofile oder Haustechnik-Leitungen können halbautomatisch generiert werden: Wird beispielsweise die Achse eines Rohrprofils erkannt, errechnet das Programm aus der umgebenden Punktestruktur den Durchmesser bzw. die Profilabmessungen, sucht in der Bauteildatenbank nach dem passenden Normbauteil und fügt dieses automatisch ein. Teilweise können auch andere anlagenspezifische Objekte wie Bögen, Ventile, Flansche, Kabelkanäle, Schächte, Treppen oder Leitern halbautomatisch generiert werden. Problembereiche innerhalb von Punktwolken, die beispielsweise durch Verschattungen oder komplexe Verschneidungen entstehen, erfordern allerdings manuelle Eingriffe. Weitere Unterstützung versprechen KI-basierende Analysemethoden. Damit lassen sich Messpunktdaten so vorstrukturieren, dass sie für die weitere Auswertung, etwa für die CAD-Planung, einfacher verwertbar sind. Dabei analysieren Lösungen wie zum Beispiel Aurivus oder Pointly die Punktwolken und liefern anschließend „smarte“ Punktwolkendaten mit Informationen über die Art der erfassten Objekte oder Bauteile – beispielsweise Gelände, Gebäude, Vegetation, respektive Wand, Stütze, Decke, Tür, Fenster – und verknüpfen sie gegebenenfalls mit weiteren Daten, etwa zu Materialien. Aus diesen Informationen lassen sich anschließend GIS-, CAD- oder BIM-Modelle einfacher erstellen. Einige Lösungen, wie etwa FARO BuildIT Construction oder Verity von ClearEdge3D unterstützen auch einen automatisierten Echtzeit-Abgleich von Punktwolkendaten mit CAD- oder BIM-Modellen. Das ermöglicht eine kontinuierliche Qualitätssicherung und Qualitätskontrolle von Bauprojekten, so dass auf der Baustelle Planungsabweichungen frühzeitig erkannt und so kostspielige Nachbesserungen vermieden werden.
Die quasi „maschinelle“ Erfassung von Millionen von Messpunkten hat Vor- und Nachteile – sowohl bei der Erfassung, als auch Auswertung. © Faro
Punktwolken und Panoramabilder nutzen
Eine mehr oder weniger aufwendige Auswertung der Messpunktdaten ist nicht immer erforderlich. Manchmal genügen bereits die erfassten Messpunkte und Fotoaufnahmen. Zusätzlich zur Messpunkterfassung wird mit den im 3D-Laserscanner integrierten Kameras auch ein sphärisches Rundum-Panoramabild von 360 Grad in der Horizontalen und etwa 300 Grad in der Vertikalen erstellt. Überlagert man es mit der Punktwolke, ist es für unterschiedliche Zwecke einsetzbar, beispielsweise für die Messung beliebiger Längen-, Flächen- oder Winkelmaße. Bereits das ist ein erheblicher Vorteil gegenüber anderen Messverfahren, die Messpunkte nur selektiv erfassen, denn wichtige Messungen vor Ort können nicht vergessen werden. Da alles erfasst wird – auch Objekte und Maße, an die man ursprünglich nicht gedacht hat – kann man jede Information jederzeit abrufen und muss sich nicht erneut an den Messort begeben. Weitere Anwendungsmöglichkeiten der Panoramabilder sind eine fotogestützte Arbeitsvorbereitung und Mitarbeitereinweisung: Montageteams können vor ihrem Einsatz mit dem Einsatzort vertraut gemacht, auf heikle Punkte aufmerksam gemacht oder wichtige Maße wie Tür-Durchgangsbreiten für die Anlieferung überprüft werden. Besprechungen oder Rückfragen zwischen Büro- und Baustellenmitarbeitern sind einfacher, weil man in den Panoramaaufnahmen jedes besprochene Detail räumlich nachvollziehen kann. Werden Baustellen kontinuierlich erfasst, entsteht eine lückenlose 3D-Dokumentation aller bis zum Aufnahmezeitpunkt realisierter Baustellenarbeiten. Da man an jedes beliebige Detail im Panoramabild Markierungen und Kommentare anfügen kann, eignen sich die 360 Grad-Panoramen auch für die Dokumentation des fertigen Projektes as built (wie gebaut). Eine weitere Einsatzmöglichkeit bieten 360 Grad-Panoramen schließlich in der virtuellen Präsentation realisierter Projekte am großformatigen Präsentationsdisplay oder per VR-Brille.

Elementare Planungsdaten erhält man bereits, wenn man durch die Punktwolke einfach horizontale oder vertikale Schnitte legt. © PointCab
Know-how und Erfahrung erforderlich
3D-Laserscanner beschleunigen die Erfassung von Objekten – allerdings wird dieser Zeitvorteil durch die aufwändige, noch immer überwiegend manuelle Bearbeitung und Auswertung der riesigen Datenmengen relativiert. Neben der Scanner-Hardware haben die Auswertungssoftware, aber auch das Know-how und die Erfahrung des Bearbeiters, einen erheblichen Einfluss auf die Effizienz und Wirtschaftlichkeit dieses Aufmaßverfahrens. Automatismen und KI-gestützte Algorithmen können insbesondere im Städtebau, Anlagen- und Stahlbau oder in der Gebäudetechnik die Auswertung und Modellierung wirkungsvoll unterstützen. In den Bereichen Architektur oder Denkmalschutz spielen sie aber noch kaum eine Rolle. Hier wird die Umwandlung von Punktwolken zu 3D- oder BIM-Modellen wohl auch weiter weitgehend manuell erfolgen.
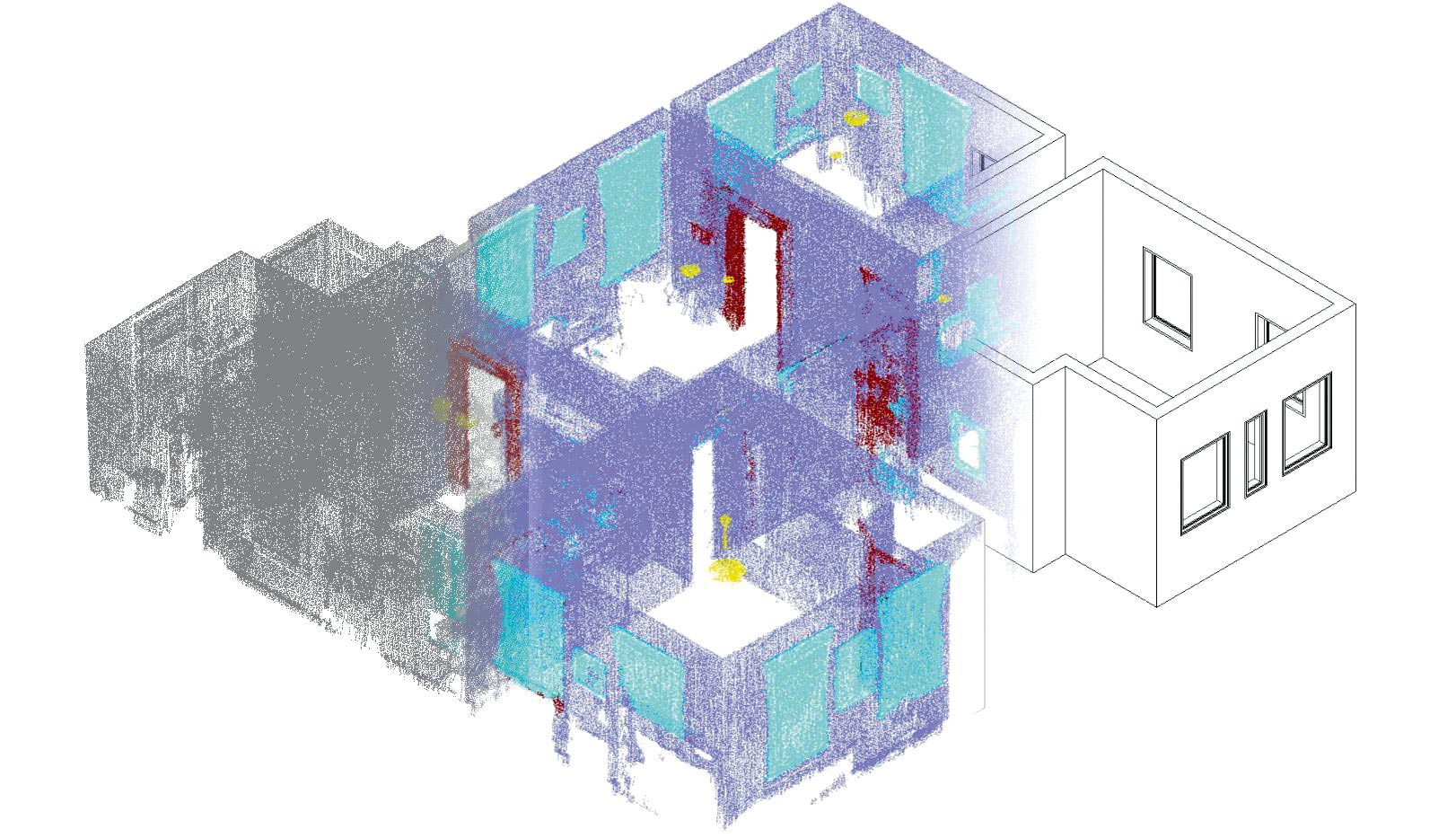
Mit KI-basierenden Analysemethoden lassen sich aus 3D-Scans Architektur-Bauteile einfacher extrahieren. © Aurivus
Produkte und Anbieter *
Arena 4D https://veesus.com
Aurivus www.aurivus.com
EdgeWise, Verity www.clearedge3d.com
Faro Scene, Faro BuildIT Construction, Faro As-Built www.faro.com
Leica Cyclone Field 360, Register 360 Plus, 3DR www.leica-geosystems.com
LupoScan www.lupos3d.de
Magnet Collage, Magnet Collage Site www.topcon.de
NavVis Ivion Core www.navvis.com
PinPoint www.scanner2go.de
PointCab Origins, PointCab Nebula www.pointcab-software.com
PointFuse https://pointfuse.com
Pointly https://pointly.ai
ReCap Pro www.autodesk.at
Riscan Pro www.riegl.com
Scalypso www.scalypso.com
Trimble RealWorks www.trimble.com
Z+F LaserControl www.zf-laser.com
* Ohne Anspruch auf Vollständigkeit.
Text: Marian Behaneck